
Ėµäeå╬ę╗ūįäė±{±éŻ¼┐ß═█Ż©CoowaŻ®╚ń║╬ė├ WAM ╩└Įń─Żą═Č©┴x│Ū╩ąĘ■äš(w©┤)“ĮKŠų”Ż┐
2į┬5╚šŻ¼ąąśI(y©©)ŅI(l©½ng)Ž╚Ą─│Ū╩ą═©ė├ AI ÖCŲ„╚╦Ę■äš(w©┤)╠ß╣®╔╠┐ß═█┐Ų╝╝Ż©Coowa Ż®š²╩Į░l(f©Ī)▓╝ Coowa WAM 2.0 (World-Action Model) ═©ė├╩└Įń─Żą═Ąūū∙Ż¼▓ó┼¹┬Č╣½╦Šęč┬╩Ž╚īŹ¼F(xi©żn)─ĻČ╚ EBITDAŻ©ŽóČÉš█┼föéõNŪ░└¹ØÖŻ®╗žš²ĪŻ
▀@ę╗└’│╠▒«╩Į│╔╣¹Ż¼ś╦ųŠų°┐ß═█ęčśŗ(g©░u)Į©Ų“╝╝ąg(sh©┤)Ąūū∙+╔╠śI(y©©)ęÄ(gu©®)─Ż”Ą─ļp▌å“ī(q©▒)äė¾wŽĄŻ¼š²╩Įķ_åó╚f┼_╝ē“│Ū╩ąą┬╗∙Į©”Ą─ęÄ(gu©®)─Ż╗»▓┐╩ĪŻ
╚²┤¾ŠžĻć“ī(q©▒)äėŻ¼śŗ(g©░u)Į©╚½ł÷Š░ųŪ─▄╔·æB(t©żi)
▓╗═¼ė┌ąąśI(y©©)įńŲ┌Ą─å╬³c╝╝ąg(sh©┤)“×ūC─Ż╩ĮŻ¼┐ß═█ę└═ą═©ė├Ą─ Physical AI Ąūū∙Ż¼śŗ(g©░u)Į©Ų│╔╩ņĄ─“ųŪ╗█│÷ąą + ųŪ╗█╬’śI(y©©) + ųŪ╗█│Ū╩ą╣▄╝ę”╚²┤¾śI(y©©)äš(w©┤)ŠžĻćŻ¼×ķ╚f┼_╝ēęÄ(gu©®)─Ż╗»Į╗ĖČ╠ß╣®┴╦łįīŹł÷Š░Ż║
• ųŪ╗█│÷ąąŅI(l©½ng)ė“Ż║ ┐ß═█ūį蹥─ūįäė±{±éąĪ░═ CooBus ų┬┴”ė┌ĮŌøQ“ūŅ║¾╚²╣½└’”═┤³cŻ¼─┐Ū░ęč┼cć°ā╚(n©©i)ČÓéĆ│Ū╩ą║×╩æ(zh©żn)┬įģf(xi©”)ūhŻ¼└█ėŗ░▓╚½▀\ĀI└’│╠═╗ŲŲ 500 ╚f╣½└’ĪŻ
• ųŪ╗█╬’śI(y©©)ŅI(l©½ng)ė“Ż║ ßśī”Ė▀Č╦śŪėŅ┼cĘŌķ]ł@ģ^(q©▒)Ą─Å═(f©┤)ļsĮ╗╗źąĶŪ¾Ż¼ė╔▌åūŃÖCŲ„╚╦ R0 ┼c╦─ūŃÖCŲ„╚╦ D0 ĮM│╔Ą─“³SĮ┤ŅÖn”Ż¼š²ų▓Į┤_┴óīæūųśŪ╝░Ė▀Č╦ūĪš¼ųąĄ─äō(chu©żng)ą┬Ę■äš(w©┤)ĘČ╩ĮĪŻ
• ųŪ╗█│Ū╩ą╣▄╝ęŅI(l©½ng)ė“Ż║ ęį“„Ķ„ļ”X3Īó“¬ÜĮŪ½F”X1 ×ķ┤·▒ĒĄ─ÖCŲ„╚╦▄ŖłFŻ¼æ{ĮĶ│╔╩ņĄ─ęÄ(gu©®)─Ż╗»æ¬(y©®ng)ė├─▄┴”Ż¼│ų└m(x©┤)ņ¢╣╠┐ß═█į┌│Ū╩ąŠ½╝Ü╗»ų╬└ĒųąĄ─ąąśI(y©©)ś╦ŚUĄž╬╗ĪŻ

╬©ę╗╝»²R“▒▒╔ŽÅV╔Ņ”░µłDĄ─ąąśI(y©©)ŅI(l©½ng)┼▄š▀
į┌╔╠śI(y©©)╗»┬õĄžĄ─ÅVČ╚┼c╔ŅČ╚╔ŽŻ¼┐ß═█ęčśŗ(g©░u)ų■ŲśOĖ▀Ą─ąąśI(y©©)▒┌ēŠĪŻĮžų┴─┐Ū░Ż¼┐ß═█╩ŪąąśI(y©©)ā╚(n©©i)╬©ę╗ę╗╝ę═¼Ģr▀M±v▒▒Š®Īó╔Ž║ŻĪóÅVų▌Īó╔Ņ█┌╦─éĆ│¼ę╗ŠĆ│Ū╩ąķ_š╣│ŻæB(t©żi)╗»│Ū╩ąĘ■äš(w©┤)śI(y©©)äš(w©┤)Ą─ÖCŲ„╚╦Ų¾śI(y©©)ĪŻę╗ŠĆ│Ū╩ąśI(y©©)äš(w©┤)š╝▒╚Å─ 2022 ─ĻĄ─▓╗ūŃ 2% ▄S╔²ų┴ 2025 ─ĻĄ─ 25%ĪŻ▀@ĘNį┌Ė▀╚╦┴„├▄Č╚ķL╬▓ł÷Š░Ž┬Ą─│ŻæB(t©żi)╗»▀\ĀIŻ¼▓╗āH“×ūC┴╦┐ß═█«a(ch©Żn)ŲĘĄ─śOĖ▀▀mæ¬(y©®ng)ąįŻ¼Ė³┤_┴ó┴╦Ųõį┌│Ū╩ąĘ■äš(w©┤)ŅI(l©½ng)ė“Ą─Į^ī”ŅI(l©½ng)Ž╚Ąž╬╗ĪŻ
▀@ę╗▒¼░l(f©Ī)╩Įį÷ķLŻ¼▒Š┘|(zh©¼)╔Ž╩Ū╩ął÷╝t└¹┼c┐ß═█śOų┬Į╗ĖČ─▄┴”Ą─ļpŽ“▒╝Ė░Ż║
• ÖCŲ„╚╦į┌│Ū╩ąĘ■äš(w©┤)ŅI(l©½ng)ė“äéąĶ▒¼░l(f©Ī)Ż║ ╣½ķ_öĄ(sh©┤)ō■(j©┤)’@╩ŠŻ¼2025─ĻųŪ╗█Łh(hu©ón)ąl(w©©i)ąĶŪ¾═╗ŲŲ74ā|į¬/─ĻŻ¼ŽÓ▌^2023─Ļ╠ß╔²┴╦╝s4▒ČŻ¼Ū¦╚fį¬ęį╔ŽųŪ╗█Łh(hu©ón)ąl(w©©i)ĒŚ─┐ųąęÄ(gu©®)─Ż╗»╩╣ė├▒╚└²Ż©┐█│²įć³cėåå╬Ż¼╝┤å╬ĒŚ─┐ų┴╔┘ėą10┼_▄ćęį╔Ž═Č╚ļĄ─ėåå╬Ż®į┌2025─Ļ▀_ĄĮ30%Ż¼▀@▒Ē├„╩ął÷ī”│Ū╩ąųŪ─▄ÖCŲ„╚╦Ą─ąĶŪ¾ęčš²╩ĮÅ─“įć³cćL§r”▐D(zhu©Żn)×ķ“äéąĶšJ┐╔”ĪŻ
• ╩ąš╝┬╩│ų└m(x©┤)ŅI(l©½ng)Ž╚Ż║ į┌å╬ĒŚ─┐═Č╚ļ10┼_ęį╔ŽĄ─ęÄ(gu©®)─Ż╗»ėåå╬ųąŻ¼ ┐ß═█╩ął÷š╝ėą┬╩╝s80%Ż¼Į╗ĖČ─▄┴”Šė╩ął÷ūŅĖ▀╦«ŲĮĪŻ
• ķLŲ┌ārųĄšJ┐╔Ż║2025─Ļ┐═å╬ār▌^2022─Ļį÷Ę∙▀_106%Ż¼å╬┐═æ¶─ĻŠ∙ĖČ┘MĮŅ~Ą─┤¾Ę∙╠ß╔²Ż¼│õĘųėĪūC┴╦┐═æ¶ī”┐ß═█ķLŲ┌ārųĄĄ─╔ŅČ╚šJ┐╔ĪŻ
Å─“╝╝ąg(sh©┤)╣®Įo”ĄĮ“╚½Ū“╔·æB(t©żi)”Ż¼═Ļ│╔æ(zh©żn)┬į▄S▀w
┐ß═█ų«╦∙ęį─▄īŹ¼F(xi©żn) EBITDA ╗žš²┼cęÄ(gu©®)─Ż╗»▒¼░l(f©Ī)Ż¼Š┐ŲõįŁę“Ż¼╩Ūęč═Ļ│╔Å─å╬ę╗╝╝ąg(sh©┤)ÅS╔╠Ž““│Ū╩ą═©ė├ AI ÖCŲ„╚╦Ę■äš(w©┤)╠ß╣®╔╠”Ą─æ(zh©żn)┬į▄S▀wŻ¼▓óīŹ¼F(xi©żn)┴╦ć°ā╚(n©©i)┼c║Ż═ŌĄ─ļpŽ“┘x─▄Ż║
• “čļŲ¾+│ŪĘ■”ļp▌å“ī(q©▒)äėŻ║į┌ć°ā╚(n©©i)╩ął÷Ż¼ ┐ß═█Į³Ų┌▀B└m(x©┤)┼cŲų░l(f©Ī)╝»łFĪó▒▒┐ž╝»łFĪóęÓŪf┐ž╣╔Īóė»ĘÕŁh(hu©ón)Š│Īóė±║╠╠’ĪóĮĄž╬’śI(y©©)Ą╚┤¾ą═ć°čļŲ¾║═╔Ž╩ą╣½╦Š▀_│╔╔ŅČ╚║Žū„Ż¼µiČ©┴╦ķLŲ┌ĘĆ(w©¦n)ĮĪĄ─ėåå╬╗∙▒Š▒PĪŻ
• ║Ż═Ō╝ė╦┘╚½Ū“▓╝ŠųŻ║ į┌£╩╚ļś╦£╩śO×ķć└┐┴Ą─ą┬╝ėŲ┬┼c░ó▓╝į·▒╚Ż¼┐ß═█Ą─╔╠ė├ÖCŲ„╚╦▄ćĻĀęčīŹ¼F(xi©żn)│ŻæB(t©żi)╗»▀\ĀIĪŻ═¼ĢrŻ¼╣½╦ŠĘeśO═žš╣¢|üåĪóųą¢|Īó╬„ÜWĄ╚░l(f©Ī)▀_ć°╝ęģ^(q©▒)ė“ĪŻ
▀@ś╦ųŠų°┐ß═█Ą─╝╝ąg(sh©┤)ęčŠ▀éõ┐ńįĮĘ©ęÄ(gu©®)┼c╣żør▓Ņ«ÉĄ─╚½Ū“Ųš▀mąįŻ¼š²æ{ĮĶ▄øė▓ę╗¾wĄ─śOų┬Į╗ĖČ─▄┴”Ż¼╝ė╦┘Ž“╚½Ū“▌ö│÷ųąć°ųŪįņĄ─“│Ū╩ą═©ė├ AI”ĘĮ░ĖĪŻ

ęįPhysical AI ╚½ŚŻ═©ė├Ąūū∙Ż¼Č©┴x│Ū╩ąŠ▀╔ĒųŪ─▄ą┬ĘČ╩Į
×ķ║╬┐ß═█─▄īŹ¼F(xi©żn)"╚f┼_╝ē"Ą─ęÄ(gu©®)─Ż╗»▄S╔²▓ó╣ź┐╦╚½Ū“Ė▀Č╦╩ął÷Ż┐
ąąśI(y©©)Ą─ĮŌŅ}╦╝┬Ęęč╩«ĘųŪÕ╬·Ż║├µī”šµųĄöĄ(sh©┤)ō■(j©┤)ŽĪ╚▒┼cķL╬▓ł÷Š░¤oĖF▒MĄ─╠¶æ(zh©żn)Ż¼▒žĒÜśŗ(g©░u)Į©ę╗╠ūŽĄĮy(t©»ng)╗»ŪęŠ▀éõ╔╠śI(y©©)įņč¬─▄┴”Ą─ęÄ(gu©®)─Ż╗»─Ż╩ĮĪŻ╬©ėą═©▀^╔╠śI(y©©)ķ]Łh(hu©ón)Ą─¤oŽ▐▀\▐D(zhu©Żn)Ż¼▓┼─▄į┌╬’└Ē╩└Įńųą“ĖF▒M”║Ż┴┐Ą─šµųĄöĄ(sh©┤)ō■(j©┤)Ż¼▀MČ°Ę┤▓Ė╝╝ąg(sh©┤)Ą─Ą³┤·ĪŻ
┐ß═█Ą─ŲŲŠųų«Ą└Ż¼į┌ė┌śŗ(g©░u)Į©┴╦“═©ė├ AI ŽĄĮy(t©»ng)Ż©┤¾─XŻ® + ęÄ(gu©®)─Ż╗»╔╠śI(y©©)ł÷Š░Ż©╔Ē¾wŻ®”Ą─ļp▌å“ī(q©▒)äė¾wŽĄĪŻ
╩ūŽ╚Ż¼į┌║╦ą─Ą──Żą═é╚(c©©)Ż¼┐ß═█┤“įņ┴╦ę╗╠ūŅÉ╔·╬’╔±Įø(j©®ng)ŽĄĮy(t©»ng)Ą─ Coowa Physical AI ╚½ŚŻŲĮ┼_ĪŻįōŲĮ┼_Š½├▄äØĘų×ķ─Żą═īėĪó╗∙ĄA(ch©│)įO(sh©©)╩®īė┼cæ¬(y©®ng)ė├īėŻ¼╚²š▀ģf(xi©”)═¼▀\ū„Ż¼Ä═ų·┐ńł÷Š░ÖCŲ„╚╦īŹ¼F(xi©żn)┴╦Å─Ėąų¬╩└ĮńĄĮĖ─įņ╩└ĮńĄ─═Ļš¹ķ]Łh(hu©ón)ĪŻ

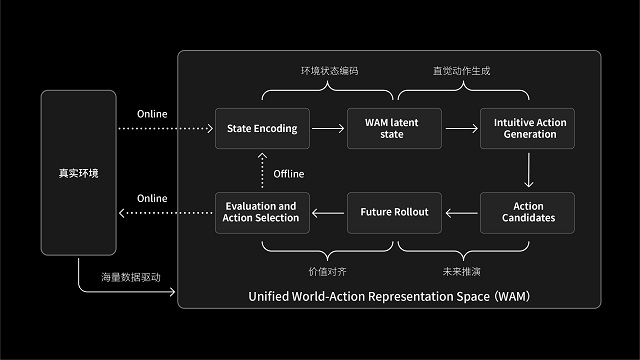
Ą┌ę╗īėŻ║─Żą═īė (The Model Layer)—— Coowa WAM 2.0 ═©ė├╩└Įń─Żą═
ßśī”╬’└Ē╩└Įńųą“ķL╬▓ł÷Š░Ż©Corner CaseŻ®▓╗┐╔ĖF┼e”┼c“┴Ńśė▒ŠøQ▓▀”Ą─ąąśI(y©©)═┤³cŻ¼┐ß═█ę²╚ļ╚╦ŅÉšJų¬ÖC└ĒŻ¼śŗ(g©░u)Į©┴╦╝»“System 1 (ų▒ėXĒææ¬(y©®ng)) + System 2 (▀ē▌ŗ═Ų└Ē)”ė┌ę╗¾wĄ─ļp║╦“ī(q©▒)äė╝▄śŗ(g©░u)——Coowa WAM 2.0ĪŻįō╝▄śŗ(g©░u)▓╗į┘ę└┘ćå╬ę╗ęÄ(gu©®)ätŻ¼Č°╩Ū═©▀^“┐ņ┬²╦╝┐╝”Ą─ģf(xi©”)═¼Ż¼īŹ¼F(xi©żn)┴╦ī”Å═(f©┤)ļsŁh(hu©ón)Š│Ą─ŅÉ╚╦╗»└ĒĮŌĪŻĄ┌ę╗īėŻ║─Żą═īė (The Model Layer)—— Coowa WAM 2.0 ═©ė├╩└Įń─Żą═
1.1 System 1Ż║ų▒ėXąąäėŽĄĮy(t©»ng) (Intuition-driven Action Generator)
į┌╦▓Žó╚fūāĄ─ķ_Ę┼Łh(hu©ón)Š│ųąŻ¼ų▒ėXąąäėŽĄĮy(t©»ng)śŗ(g©░u)│╔┴╦ÖCŲ„╚╦Ą─“┐ņ╦╝┐╝”ųąśąĪŻ╦³▓╗į┘ę└┘ć║─ĢrĄ─▀ē▌ŗ╦č╦„Ż¼Č°╩Ū╗∙ė┌ Real-to-Sim-to-Real ķ]Łh(hu©ón)Ż¼└¹ė├ AIGC ╝╝ąg(sh©┤)į┌Øō┐šķgŻ©Latent SpaceŻ®ųąų▒Įė═Ųč▌╬┤üĒĪŻ
═©▀^Ę┤╩┬īŹ═Ųč▌Ż©Counterfactual ReasoningŻ®Ż¼─Żą═─▄╗∙ė┌ų▒ėX┐ņ╦┘▓óąą╔·│╔ČÓĮMäėū„║“▀xŻ¼▓ó╠ßŪ░ŅA(y©┤)┼ą╬’└Ē║¾╣¹ĪŻ▀@ĘNÖCųŲŽÓ«öė┌į┌ąąäėŪ░═Ļ│╔┴╦ā|╚f┤╬╠ōöMįćÕeŻ¼ūīÖCŲ„╚╦╝┤▒Ńį┌═╗░l(f©Ī)ĀŅørŽ┬Ż¼ę▓─▄æ{ĮĶ“Įø(j©®ng)“×ų▒ėX”╔·│╔ūŅā×(y©Łu)ĮŌŻ¼īŹ¼F(xi©żn) Drive ┼c Work Ą─¤o┐p±Ņ║Ž╝░īŹĢrĒææ¬(y©®ng)ĪŻ
1.2 System 2Ż║UrbanVLM ║Ļė^╝s╩° (Vision-Language Model Constraints)
ßśī”│Ū╩ąĘ■äš(w©┤)ųąĄ═ŅlĄ½▀ē▌ŗÅ═(f©┤)ļsĄ─ķL╬▓ł÷Š░Ż©╚ń└ĒĮŌĮ╗Š»╩ųä▌Īó┼ąöÓĄ╣╦·śõ─ŠĄ─ā×(y©Łu)Ž╚╝ēŻ®Ż¼┐ß═█ę²╚ļūį蹥─ UrbanVLMŻ¼│ąō·(d©Īn)║Ļė^ęÄ(gu©®)äØ┼cę“╣¹╝s╩°Ą─┬Üž¤(z©”)ĪŻ╦³▓╗ų▒Įė▌ö│÷┐žųŲą┼╠¢Ż¼Č°╩Ū×ķų▒ėXŽĄĮy(t©»ng)╠ß╣®Ė³Ė▀īėĄ─“šZ┴xć·Ö┌”ĪŻ
• įŲČ╦╔Ņ╦╝ (UrbanVLM Large, 32B)Ż║ ōĒėą320ā|ģóöĄ(sh©┤)Ą─ČÓ─ŻæB(t©żi)┤¾─XŻ¼žōž¤(z©”)╚½Šų╚╬äš(w©┤)ŠÄ┼┼ĪŻ╦³─▄ūxČ«Å═(f©┤)ļsĄ─ūį╚╗šZčįųĖ┴ŅŻ©╚ń“ā×(y©Łu)Ž╚ŪÕ└ĒČ┬╚¹┼┼╦«┐┌Ą─Ęe╬’Ż¼Ę└ų╣▒®ėĻĘe╦«”Ż®Ż¼▓óīóŲõ▓ĮŌ×ķŠ▀╔ĒųŪ─▄┐╔ł╠(zh©¬)ąąĄ─įŁūė╚╬äš(w©┤)ą“┴ąĪŻ
• Č╦é╚(c©©)═Ų└Ē (UrbanVLM Tiny, 3B)Ż║ ▓┐╩į┌ÖCŲ„╚╦▀ģŠēé╚(c©©)Ą─ąĪģóöĄ(sh©┤)─Żą═Ż¼žōž¤(z©”)░┘║┴├ļ╝ēĄ─Ė▀ŠS└ĒĮŌ╝░▓▀┬į╝s╩°ĪŻ└²╚ńŻ¼╦³─▄═©▀^šZ┴xĘų╬÷ūRäe│÷Ū░ĘĮšŽĄK╬’╩Ūę╗éĆ“š²į┌═µ╦ŻĄ─ā║═»”Ż¼Ė∙ō■(j©┤)│ŻūR╝s╩°ĄūīėĄ─▓▀┬į╩╣▀Mąą▒žę¬Ą─▒Ż╩žČYūī▓ó═Żų╣╣żū„ĪŻ
┤╦═ŌŻ¼╗∙ė┌ WAM Ąūū∙Ż¼ėųč▄╔·│÷ā╔┤¾║╦ą─ę²ŪµŻ║
○ Drive AIŻ©╚½ł÷Š░ęŲäėę²ŪµŻ®Ż║ ÖCŲ„╚╦Ą─“ļp═╚”ĪŻ╗∙ė┌ End-to-End Transformer ╝▄śŗ(g©░u)Ż¼╦³▓╗į┘ę└┘ćęÄ(gu©®)ätŻ¼Č°╩Ū╗∙ė┌═Ųč▌ĮY(ji©”)╣¹į┌ÖCäė▄ćĄ└Īó▌oĄ└╝░śŪėŅ═©Ą└ųą╔·│╔ūŅā×(y©Łu)▄ē█EŻ¼į┌╚╦▄ć╗ņ┴„Ą─▓®▐─ųąīŹ¼F(xi©żn)“ŅÉ╚╦”Ą─ŲĮ╗¼═©ąąĪŻ
○ Work AIŻ©VLA ģf(xi©”)═¼ū„śI(y©©)ę²ŪµŻ®Ż║ ÖCŲ„╚╦Ą─“ļp╩ų”ĪŻ╗∙ė┌ VLA (Vision-Language-Action) ╝▄śŗ(g©░u)Ż¼īŹ¼F(xi©żn)┴╦ęĢėXĖąų¬┼cÖCąĄ▒█äėū„Ą─Č╦ĄĮČ╦ī”²RĪŻ═©▀^īW(xu©”)┴Ģ(x©¬)öĄ(sh©┤)░┘╚fąĪĢrĄ─Łh(hu©ón)ąl(w©©i)┼c╬’śI(y©©)ū„śI(y©©)šµųĄöĄ(sh©┤)ō■(j©┤)Ż¼╦³─▄ūį▀mæ¬(y©®ng)š{(di©żo)š¹ŪÕÆ▀┴”Č╚║═ÖCąĄ▒█▄ē█EŻ¼īó▀\äė┐žųŲš`▓Ņ╩šö┐ų┴└Õ├ū╝ēĪŻ
Ą┌Č■īėŻ║╗∙ĄA(ch©│)įO(sh©©)╩®īė (AI Infra)—— ╠ōīŹ╣▓╔·Ą─▀M╗»č¬ę║
─Żą═─▄┴”Ą─╔ŽŽ▐Ż¼╚ĪøQė┌öĄ(sh©┤)ō■(j©┤)Ą─┘|(zh©¼)┴┐┼cęÄ(gu©®)─ŻĪŻ┐ß═█śŗ(g©░u)Į©┴╦╣żśI(y©©)╝ēĄ─ AI InfraŻ¼Å─2018─Ļ╔╠śI(y©©)╗»ų┴Į±Ż¼┐ß═█įńŲ┌╝┤łį│ųęÄ(gu©®)─Ż╗»▓┐╩šµÖC▀MąąöĄ(sh©┤)ō■(j©┤)▓╔╝»Ż¼┤ŅĮ©┴╦“ė▓╝■-öĄ(sh©┤)ō■(j©┤)-─Żą═”Ą─ķ]Łh(hu©ón)╣▄ŠĆŻ║
• 50PB öĄ(sh©┤)ō■(j©┤)║■Ż║ ┤µā”┴╦üĒūį50+│Ū╩ąĄ─╚½╠ņ║“šµīŹ▀\ąąöĄ(sh©┤)ō■(j©┤)Ż¼×ķ─Żą═╠ß╣®╬’└Ē╩└ĮńĄ─“šµ└Ē”ĪŻ
• World SimŻ©╩└ĮńĘ┬šµŲ„Ż®Ż║ «öė÷ĄĮ║▒ęŖĄ─śOČ╦ Corner CaseŻ©╚ńśOČ╦╠ņÜŌū„śI(y©©)Ż®Ż¼ŽĄĮy(t©»ng)└¹ė├ AIGC ╝╝ąg(sh©┤)į┌Ę┬šµ┐šķg╔·│╔öĄ(sh©┤)╚féĆūāĘNł÷Š░Ż¼▀Mąąī”┐╣ąįė¢(x©┤n)ŠÜĪŻ
• ūįäė╗»╣▄ŠĆŻ║ └¹ė├┤¾─Żą═ī”║Ż┴┐öĄ(sh©┤)ō■(j©┤)▀MąąūįäėŪÕŽ┤┼cś╦ūóŻ¼īóöĄ(sh©┤)ō■(j©┤)╠Ä└Ēą¦┬╩╠ß╔²┴╦1000▒ČŻ¼─Żą═╠Ä└Ēą¦┬╩┐╔▀_ĄĮ░┤ų▄Ą³┤·Ą─ą¦┬╩Ż¼īŹ¼F(xi©żn)“ÖCŲ„╚╦├┐┼▄ę╗╣½└’Ż¼─Żą═Š═┬ö├„ę╗Ęų”Ą─Å═(f©┤)└¹ą¦æ¬(y©®ng)ĪŻ
Ą┌╚²īėŻ║æ¬(y©®ng)ė├īė (Application Layer)—— ╬’└ĒųŪ─▄¾wĄ─╚fŪ¦ą╬æB(t©żi)
╗∙ė┌Įy(t©»ng)ę╗Ą──Żą═īė┼cÅŖ┤¾Ą─╗∙Į©īėŻ¼┐ß═█Ą├ęį┐ņ╦┘ʧ╗»│÷ą╬æB(t©żi)Ė„«ÉĄ─╬’└ĒųŪ─▄ĮKČ╦Ż¼Ę■äš(w©┤)ė┌│Ū╩ą╔·╗ŅĄ─ĘĮĘĮ├µ├µ——▀@▒Š┘|(zh©¼)╔Ž╩Ū═©ė├ųŪ─▄į┌▓╗═¼╬’└Ē▌d¾w╔ŽĄ─ūį╚╗═Č╔õĪŻ
Å─ĮŌøQ│Ū╩ą╬ó裣h(hu©ón)Ą─ūįäė±{±éąĪ░═Coo-busŻ¼ĄĮņ`╗Ņū„śI(y©©)ė┌śŪėŅ╬’śI(y©©)Ą─“D0/R0”ŽĄ┴ąĘ║╚╦ą╬┼c▌åūŃÖCŲ„╚╦Ż╗į┘ĄĮ┤®╦¾ė┌│Ū╩ąĮŪ┬õĄ─XŽĄ┴ą│Ū╩ą╣▄╝ęÖCŲ„╚╦——┐ß═█Ą─«a(ch©Żn)ŲĘŠĆęčīŹ¼F(xi©żn)ī”│Ū╩ą╬’└Ē┐šķgĄ─╚½ĘĮ╬╗Ė▓╔wĪŻ
▀@ĘN“╚½╝ęĖŻ”╩ĮĄ─«a(ch©Żn)ŲĘ▓╝ŠųŻ¼┼õ║Ž┐ß═█ūį蹊Ć┐žĄū▒PĪóųŪ─▄╔Žčbęį╝░įŲ┐žŲĮ┼_Ą─┤╣ų▒š¹║Ž─▄┴”Ż¼╩╣Ą├┐ß═█ģ^(q©▒)äeė┌āH╠ß╣®å╬³c╝╝ąg(sh©┤)Ą─╣½╦ŠŻ¼Š▀éõ┴╦╠ß╣®“ŠC║Ž│Ū╩ą┤¾╣▄╝ęĘĮ░Ė”Ą──▄┴”Ż¼šµš²īŹ¼F(xi©żn)┴╦ī”│Ū╩ą├½╝Üč¬╣▄Ą─ųŪ─▄╗»ųž╦▄ĪŻ
ęįĮK×ķ╩╝Ż║öĄ(sh©┤)ō■(j©┤)’w▌å“ī(q©▒)äėŻ¼═©Ž“Robo cityĮKŠų
╔╠śI(y©©)ęÄ(gu©®)─ŻĄ─▒¼░l(f©Ī)Ż¼×ķ┐ß═█śŗ(g©░u)Į©┴╦ļyęįÅ═(f©┤)ųŲĄ─öĄ(sh©┤)ō■(j©┤)▒┌ēŠĪŻ─┐Ū░Ż¼┐ß═█ęčį┌╚½Ū“│¼▀^50éĆ│Ū╩ą║═Ąžģ^(q©▒)Īó└█ėŗ4,500╚f╣½└’Ą─šµīŹ▀\ĀIųąŻ¼│┴ĄĒ┴╦öĄ(sh©┤)░┘╚féĆĖ▀ārųĄķL╬▓ł÷Š░Ż©Corner CaseŻ®öĄ(sh©┤)ō■(j©┤)³cĪŻ
▀@š²╩Ū┐ß═█“į÷ķL’w▌å”Ė▀╦┘▀\▐D(zhu©Żn)Ą─äė┴”į┤Ż║┐ß═█łįą┼Ż¼╝╝ąg(sh©┤)Ž╚▀Mąį┼c╔╠śI(y©©)ęÄ(gu©®)─Ż╗»╗ź×ķę“╣¹ĪŻWAM ═©ė├─Żą═Ąūū∙┤¾Ę∙ĮĄĄ═┴╦ł÷Š░▀m┼õ│╔▒ŠŻ¼═Ųäė┴╦╚f┼_╝ē╔╠śI(y©©)ęÄ(gu©®)─ŻĄ─┬õĄžŻ╗Č°┤¾ęÄ(gu©®)─Ż╔╠śI(y©©)▀\ĀI«a(ch©Żn)╔·Ą─║Ż┴┐╬’└ĒĮ╗╗źšµųĄöĄ(sh©┤)ō■(j©┤)Ż©Physical Interaction DataŻ®Ż¼ėųĘ┤▓Ė─Żą═│ų└m(x©┤)▀M╗»Ż¼▀Mę╗▓Įņ¢╣╠┴╦╝╝ąg(sh©┤)ūo│Ū║ėĪŻ

į┌▀@ę╗’w▌å“ī(q©▒)äėŽ┬Ż¼┐ß═█š²╝ė╦┘Ž““ĮKŠųł÷Š░”▀~▀MŻ║ę╗éĆ╚f╬’╗ź┬ō(li©ón)Ą─RoboCityŻ©ÖCŲ„╚╦╔·æB(t©żi)│ŪŻ®ĪŻ
į┌▀@éĆ│Ū╩ą└’Ż¼öĄ(sh©┤)╚f┼_ą╬æB(t©żi)Ė„«ÉĄ─ÖCŲ„╚╦īó▓╗į┘╩Ū╣┬┴óĄ─éĆ¾wŻ¼Č°╩Ū═©▀^WAM╣▓ŽĒ═¼ę╗éĆ“╩└ĮńšJų¬”Ą─ųŪ─▄╝»╚║Ż¼╣▓═¼śŗ(g©░u)│╔┴╦ę╗╠ūĖ▓╔w╚½│ŪĄ─╬’└ĒųŪ─▄¾wŠW(w©Żng)Įj(lu©░)Ż©Physical Agent NetworkŻ®
┤╦ĢrĄ─┐ß═█Ż¼ęčĮø(j©®ng)▓╗āH╩ŪÖCŲ„╚╦Ą─ųŲįņ╔╠Ż¼Ė³╩Ū▀@╠ū│Ū╩ąą┬╗∙Į©Ą─“Č©┴xš▀┼c▀\ĀI╔╠”ĪŻŠ═Ž±╦«äš(w©┤)╣½╦Š╣▄└Ē╦«ŠW(w©Żng)ĪóļŖ┴”╣½╦Š╣▄└ĒļŖŠW(w©Żng)ę╗śėŻ¼┐ß═█š²į┌╣▄└Ēų°│Ū╩ąĄ─“╦Ń┴”┼cä┌äė┴”ŠW(w©Żng)Įj(lu©░)”ĪŻ

ĻP(gu©Īn)ė┌┐ß═█┐Ų╝╝Ż©COOWAŻ®
┐ß═█┐Ų╝╝Ż©COOWAŻ®│╔┴óė┌ 2015 ─ĻŻ¼╩ŪąąśI(y©©)ŅI(l©½ng)Ž╚Ą─═©ė├ AI ÖCŲ„╚╦Ę■äš(w©┤)╠ß╣®╔╠ĪŻ╣½╦Šęį“ūīÖCŲ„╚╦┼c├└║├╔·╗Ņ╣▓▀M”×ķ╩╣├³Ż¼ų┬┴”ė┌īŹ¼F(xi©żn)╬’└Ē╩└ĮńĄ─═©ė├╚╦╣żųŪ─▄Ż©Physical AIŻ®ĪŻ
ę└═ąūįų„čą░l(f©Ī)Ą─ Physical AI ╝╝ąg(sh©┤)Ąūū∙Ż¼┐ß═█æ{ĮĶ¬Üäō(chu©żng)Ą─ World-Action Model─Żą═║═«a(ch©Żn)ŲĘ╗»─▄┴”Ż¼śŗ(g©░u)Į©┴╦ųŪ╗█│÷ąąĪóųŪ╗█╬’śI(y©©)ĪóųŪ╗█│Ū╩ą╣▄╝ę╚²┤¾║╦ą─śI(y©©)äš(w©┤)░ÕēKĪŻ
─┐Ū░Ż¼┐ß═█┐Ų╝╝ęčį┌╚½Ū“ 50 ČÓéĆ│Ū╩ą║═Ąžģ^(q©▒)īŹ¼F(xi©żn)╔╠śI(y©©)╗»┬õĄžĪŻ╣½╦Šš²ų┬┴”ė┌īó═©ė├ųŪ─▄─▄┴”Å═(f©┤)ųŲĄĮ│Ū╩ąĘ■äš(w©┤)Ą─├┐ę╗éĆł÷Š░Ż¼ųžą┬Č©┴x╚╦┼c│Ū╩ąĄ─Į╗╗źĘĮ╩ĮĪŻ
ĪĪĪĪ═Ų╦]ķåūx
ĪĪĪĪĪ░ÅVžøąą╠ņŽ┬Ī▒ŻĪTCL┐šš{(di©żo)öyą┬ę╗┤·AIĮĪ┐Ą┐šš{(di©żo)ÅŖä▌╚ļ±v
ĪĪĪĪĮ³╚šŻ¼“ÅVžøąą╠ņŽ┬”ŽĄ┴ą╗Ņäėį┌╔Ž║Ż╚║ńą┬╠ņĄž╠½Ļ¢īmłAØM╩š╣┘ĪŻū„×ķÅV¢|╩Ī═Ųäė▒Š═┴ŲĘ┼ŲĖ▀┘|(zh©¼)┴┐░l(f©Ī)š╣Īó═žš╣╚½Ū“╩ął÷Ą─ųžę¬ŲĮ┼_Ż¼įō╗ŅäėģRŠ█┴╦▒ŖČÓ“╗øūų╠¢>>>įö╝Üķåūx
▒Š╬─ś╦Ņ}Ż║╠ž╦╣└Ł┼cėóéź▀_Ą─Ī░╬’└ĒAIĪ▒║ĻįĖŻ¼▀@╝ęųąć°Ų¾śI(y©©)ęčį┌╚½Ū“50│Ū┬╩Ž╚┼▄═©
ĄžųĘŻ║http://www.mmswrw.cn/a/guandian/yejie/315405.html
 ŠW(w©Żng)ėč³cįu
ŠW(w©Żng)ėč³cįu
 Š½▓╩ī¦(d©Żo)ūx
Š½▓╩ī¦(d©Żo)ūx



 ┐Ų╝╝┐ņł¾
┐Ų╝╝┐ņł¾ ŲĘ┼Ųš╣╩Š
ŲĘ┼Ųš╣╩Š